
This week, I am using the recently added support for M5Stack Core2 (thank you, Martin!) as an excuse to show you some pretty cool Zephyr tricks that I’m confident many of you didn’t know about 
Before jumping right in, I want to say a big thank you to everyone who tuned in to the first Zephyr Tech Talk earlier this week. It was a lot of fun, there were tons of questions, and Mike was the perfect guest for this first episode.
On Wednesday, September 27, I will be chatting with Bjarki Arge Andreasen about the newly introduced modem subsystem, and I highly encourage you to sign up already to make sure you don’t miss this!
M5Stack Core2 is now supported, and why I find it extra cool


I am really excited that the support for M5Stack Core2 finally got merged this week. This is yet another great contribution from Martin Kiepfer and, similarly to the M5StickC Plus, I particularly like how this device is packed with on-board peripherals that happen to just work out-of-the-box in Zephyr.
I might record a longer demo video in the next few days, but in the meantime let me just show you three examples of why having out-of-the-box and full-blown support for the on-board peripherals is really neat:
- The M5Stack Core2 features a power-management IC (PMIC), an AXP192, which is one of the supported regulators in Zephyr. It controls, among other things, the voltage being sent to the LCD backlight.
Not sure what would be an appropriate brightness level for the LCD in your application? Curious about how low you can get until things are not really readable for your end-users anymore?
Well, just use the built-in shell commands to interact with the regulator, and voila! No need to write custom test code and—maybe more importantly—no risk to fry your device since the min/max limits for all the power outputs are configured separately in the Devicetree.
uart:~$ regulator vget DCDC3
2.800 V
uart:~$ regulator vset DCDC3 2.5V
uart:~$ regulator vset DCDC3 3.3V
- There is a real-time clock on board of the device (BM8563), connected to the main ESP32 over I2C.
It’s of course a pretty useful companion for many applications where you need the date and. Again, not only is this particular RTC chip supported (so you can interact with it using the standard RTC API), but similarly to the regulator shell before you can, for example, easil set the date and time interactively, without having to write a single line of code for that.
uart:~$ rtc get pfc8563@51
2023-09-15T15:31:53:000000
uart:~$ rtc set pfc8563@51 2022-12-22
uart:~$ rtc get pfc8563@51
2022-12-22T15:32:13:000000
- Last and certainly not least, the Core2 has an LCD display and a touch panel.
I’ve mentioned it many times before but LVGL is an awesome tool for building embedded GUIs, and the fact that this particular device also has a touch interface makes it even more interesting, since LVGL input device interfaces and Zephyr’s input subsystem can work hand-in-hand. And as it seems to be all about shell awesomeness this week, here’s one more trick for you: the LVGL shell!
It can be enabled using CONFIG_LV_Z_SHELL and it adds a couple commands that can be particularly useful for testing/troubleshooting your GUI. We all know that UI testing can be tricky, and even more so on embedded systems, and one such command allows you to enable an LVGL monkey which can be a great alternative to basically stress-test your UI and catch potential bugs, memory leaks, etc. Also, it’s super fun to watch, just see below!
uart:~$ lvgl monkey create pointer

Picolibc
This one is a pretty significant change! Picolibc is now the default C library for Zephyr.
Picolibc is a library offering standard C library APIs that targets small embedded systems with limited RAM.
In a nutshell, Picolibc brings even more modularity and configurability, making it easier to fine tune the footprint/performance of the C library. It’s also meant to bring you the best of both worlds between Zephyr’s minimal libc (small, but lacking too many features), and newlib (too heavy for most applications).
But frankly, I think I need to invite Keith, Picolibc’s author, to tell us more about it during an upcoming Zephyr Tech Talk (Keith, if you’re reading this…  ).
).
You can of course still use CONFIG_LIBC_IMPLEMENTATION Kconfig to use another C library implementation.
Other boards & SoCs
Other boards added this week:
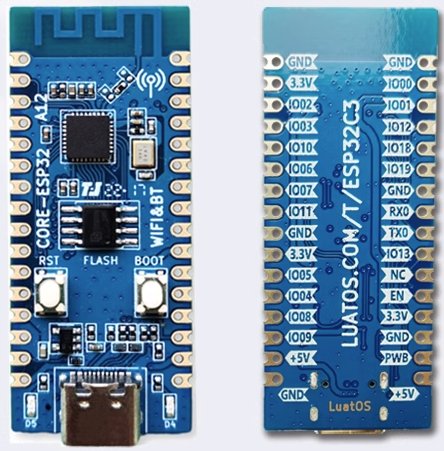
- ESP32C3 LuatOS. Pretty nice to see more RISC-V boards, it had been a while! (PR #61915)
- Raytac MDBT53-DB-40 and MDBT53V-DB-40 (PR #58841)
Drivers
This week has been insane on the drivers front. Apologies if the list below is maybe not diving as deep as I typically try to into the specifics of each sensor as I usually do, but there’s just too much to cover this week. Hopefully the list below is a good and useful summary nevertheless.
- Add support for devices of the ADC family MAX11102-MAX11117. (PR #60328)
- TI TAS6422 is a two-channel audio amplifier for automotive applications (PR #59678)
- TI BQ27z746 fuel gauge. (PR #59382)
- TSL2540 ambient light sensor, a sensor that has, according to its datasheet, near photopic responsiveness (and yes, you too probably learned a word today!). (PR #59330)
- When using RTC on STM32, it’s now possible to use calibration features (set_calibration / get_calibration), thanks to PR #62304, which also brings other fixes/improvements.
- CAN-FD support has been added to ISO-TP, and the ISO-TP code sample has been updated accordingly. (PR #60323)
- LPDAC (Low-Power Digital-to-Analogue Converter) support has been added for NXP LPCXpresso55S36. (PR #61459)
- Native SD card support added for Microchip SAM4E MCU series (using ATMEL HSMCI peripheral). (PR #58233)
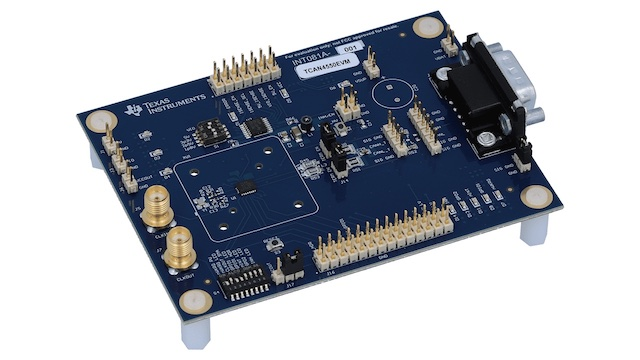
- TI TCAN4x5x series of CAN controllers now supported, alongside the dedicated evaluation board, TCAN4550EVM. (PR #62033)
- Current sense amplifier driver, providing an easy way to describe a current sensing circuit hooked to an ADC, using some Devicetree magic, just see below. (PR #59139)
test_current: current_amp {
status = "okay";
compatible = "current-sense-amplifier";
io-channels = ;
io-channel-names = "CURRENT_AMP";
sense-resistor-micro-ohms = ;
sense-gain-mult = ;
sense-gain-div = ;
};
- It’s now possible to use NXP’s MU (Messaging Unit) as an MBOX device for inter-process communication.
- Added support for Raspberry Pi Pico timer. (PR #57134)
- KSCAN driver for Microchip now supports low-power mode. (PR #60806)
- Driver for SSD1306 display now supports connections over SPI and I2C simultaneously. (PR #56887)
- Driver for the BMM150 magnetometer now supports trigger mode. (PR #57985)
Miscellaneous
- In addition to Bash and zsh, you can setup autocompletion for your West commands in fish shell. (PR #62477)
- Added architectural support for shared interrupts. (PR #61422)
I invite you to read this to learn more. - More LVGL goodness! PR #62141 introduces support for encoders as input devices. This can make for cool user interactions where you can e.g. use an encoder to focus on next/previous widget in the UI.
- Wi-Fi shell keeps improving with PR #62201.
A big thank you to the 12 individuals who had their first pull request accepted this week, 
 : @electrocnic, @chuangzhu, @tswaehn, @andy3469, @likongintel, @Albort12138, @JPHutchins, @yclistanford, @vg-sc, @VivekUppunda, @wkhadgar, and @Emplis.
: @electrocnic, @chuangzhu, @tswaehn, @andy3469, @likongintel, @Albort12138, @JPHutchins, @yclistanford, @vg-sc, @VivekUppunda, @wkhadgar, and @Emplis.
As always, please feel free to jump in with your thoughts or questions in the comments below. See you next week!