

Exploring Fuzzing for Zephyr Applications with libFuzzer and AFL++
Exploring Fuzzing for Zephyr Applications with libFuzzer and AFL++
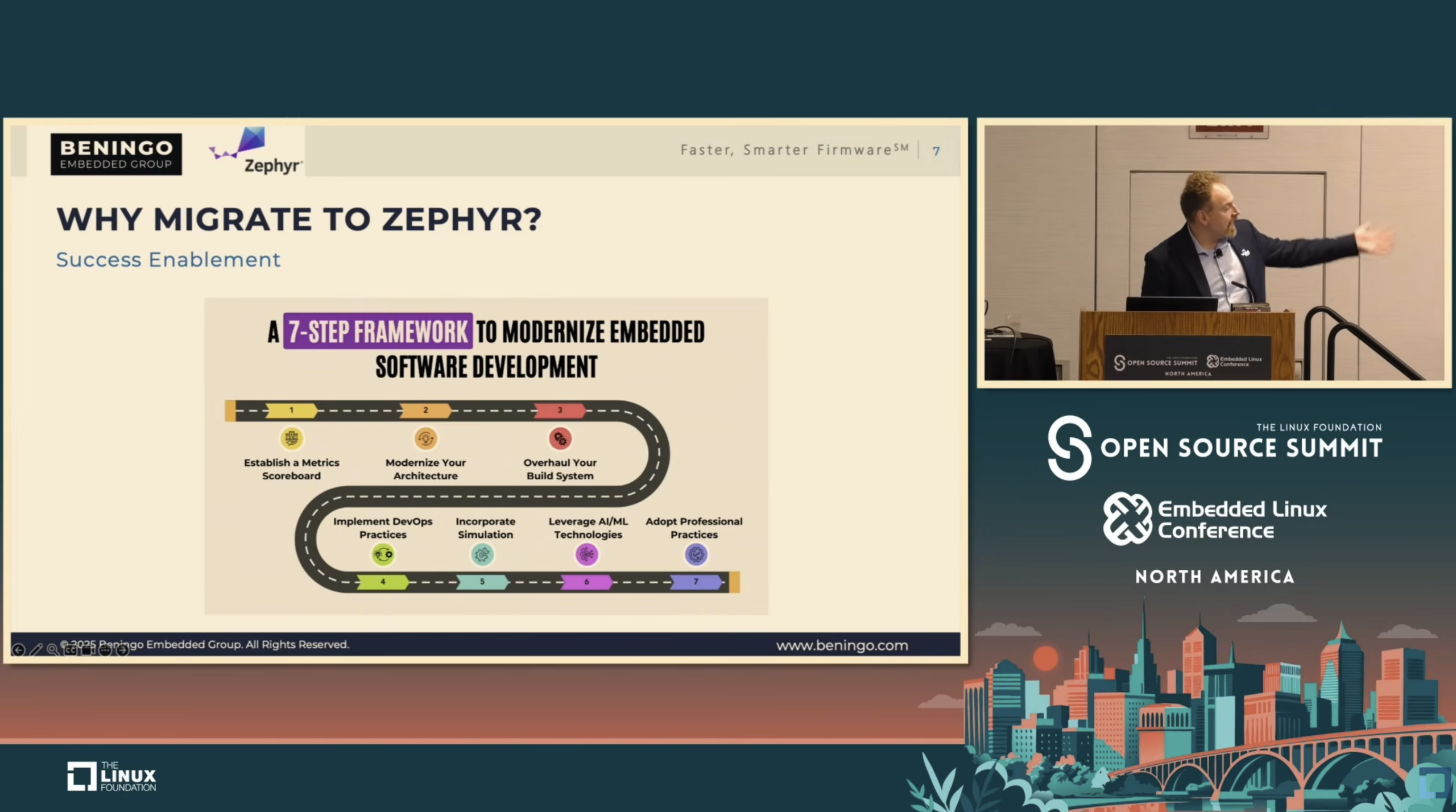
From FreeRTOS To Zephyr: A Practical Migration Guide for Embedded Developers – Jacob Beningo, Beningo Embedded Group
From FreeRTOS To Zephyr: A Practical Migration Guide for Embedded Developers – Jacob Beningo, Beningo Embedded Group

Github vs. Raspberry Pi in a Closet — Zephyr Podcast #043
Github vs. Raspberry Pi in a Closet — Zephyr Podcast #043

Zephyr at 10 Years: Survey Feedback – Kate Stewart & Hilary Carter, The Linux Foundation
Zephyr at 10 Years: Survey Feedback – Kate Stewart & Hilary Carter, The Linux Foundation

Inside the Zephyr Project Meetup in Copenhagen, Denmark
Inside the Zephyr Project Meetup in Copenhagen, Denmark
Anomaly detection in embedded devices using the Zephyr Sensor Anomalies library
Anomaly detection in embedded devices using the Zephyr Sensor Anomalies library

What to Expect at the Zephyr Project Meetup (June 30, 2026) in Lyon, France