The Zephyr Project community is heading to Braunschweig, Germany! Join us on Thursday, August 13, 2026, for an in-person Zephyr Project Meetup organized by Siemens, with TU Braunschweig serving as…
The Zephyr Project community is heading to Hyderabad, India! Join us on Wednesday, August 5, 2026, for an in-person Zephyr Project Meetup organized by Dotstar Systems, with Silicon Labs serving…
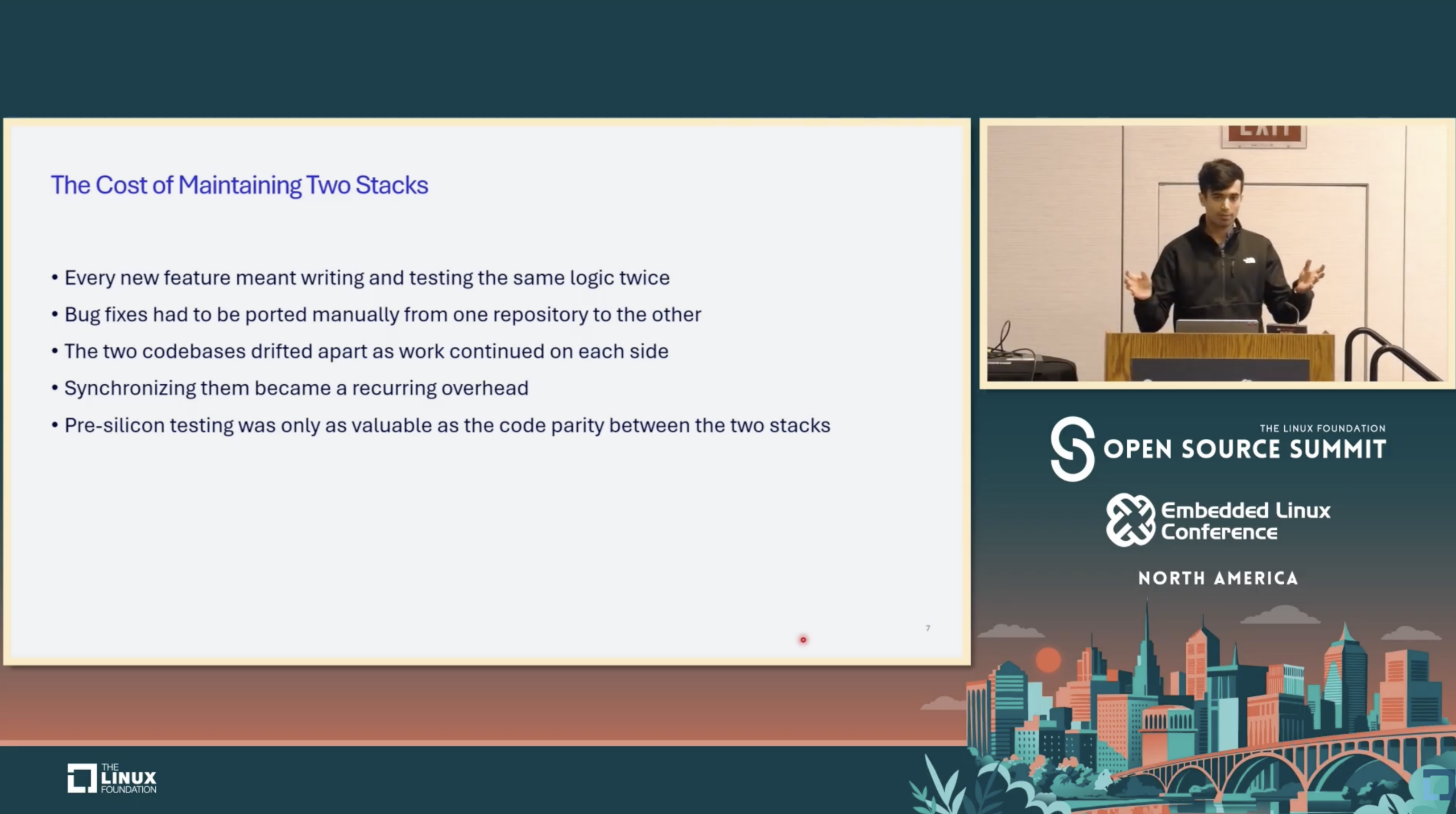
Open Source Summit North America 2026 and Embedded Linux Conference brought together the open source community in Minneapolis from May 18-20, 2026. As part of the Zephyr track, Dev Bhaveshbhai…
This year marks the Zephyr Project's 10th anniversary - a decade of open source innovation in embedded systems and IoT, built entirely on the work of our community. To celebrate…
Open Source Summit North America 2026 and Embedded Linux Conference brought together the open source community in Minneapolis from May 18-20, 2026. As part of the Zephyr track, Jayashree Srinivasan…
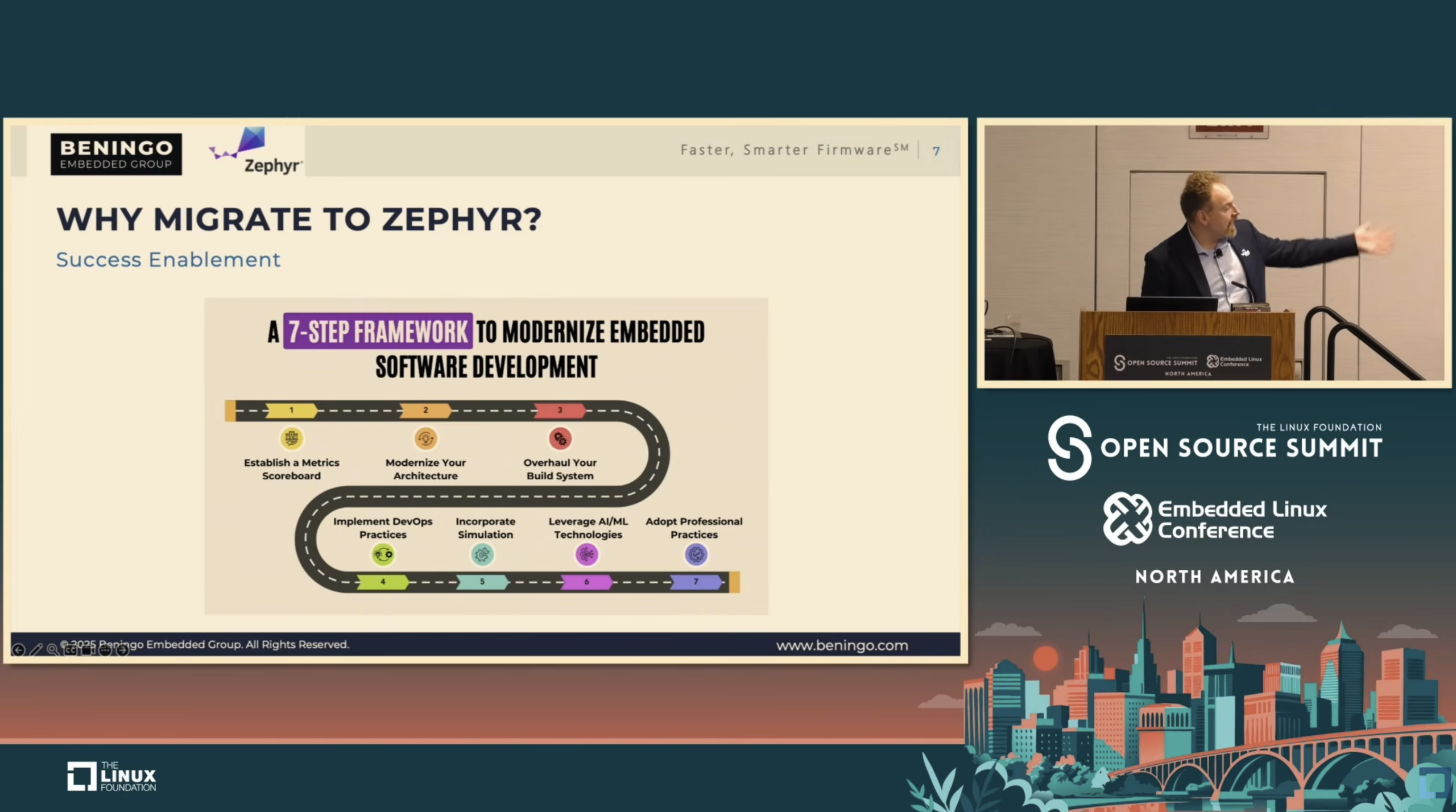
Open Source Summit North America 2026 and Embedded Linux Conference brought together the open source community in Minneapolis from May 18-20, 2026. As part of the Zephyr track, Jacob Beningo…
https://www.youtube.com/watch?v=AKpljex3LXI Device filesystem for /dev-style access and Linux portability CDAC THEJAS32 RISC-V support Proposed fan subsystem Twister preferred_toolchain support for better LLVM coverage (among other things) Initial DWC2 USB host controller support Pouch, portable data across devices, gateways,…
Open Source Summit North America 2026 and Embedded Linux Conference brought together the open source community in Minneapolis from May 18-20, 2026. As part of the Zephyr track, Kate Stewart…
The Zephyr Project Community Meetup Series came to Copenhagen, Denmark, on May 12, 2026, bringing together developers, engineers, contributors, and open source enthusiasts for an evening of technical sessions, networking,…
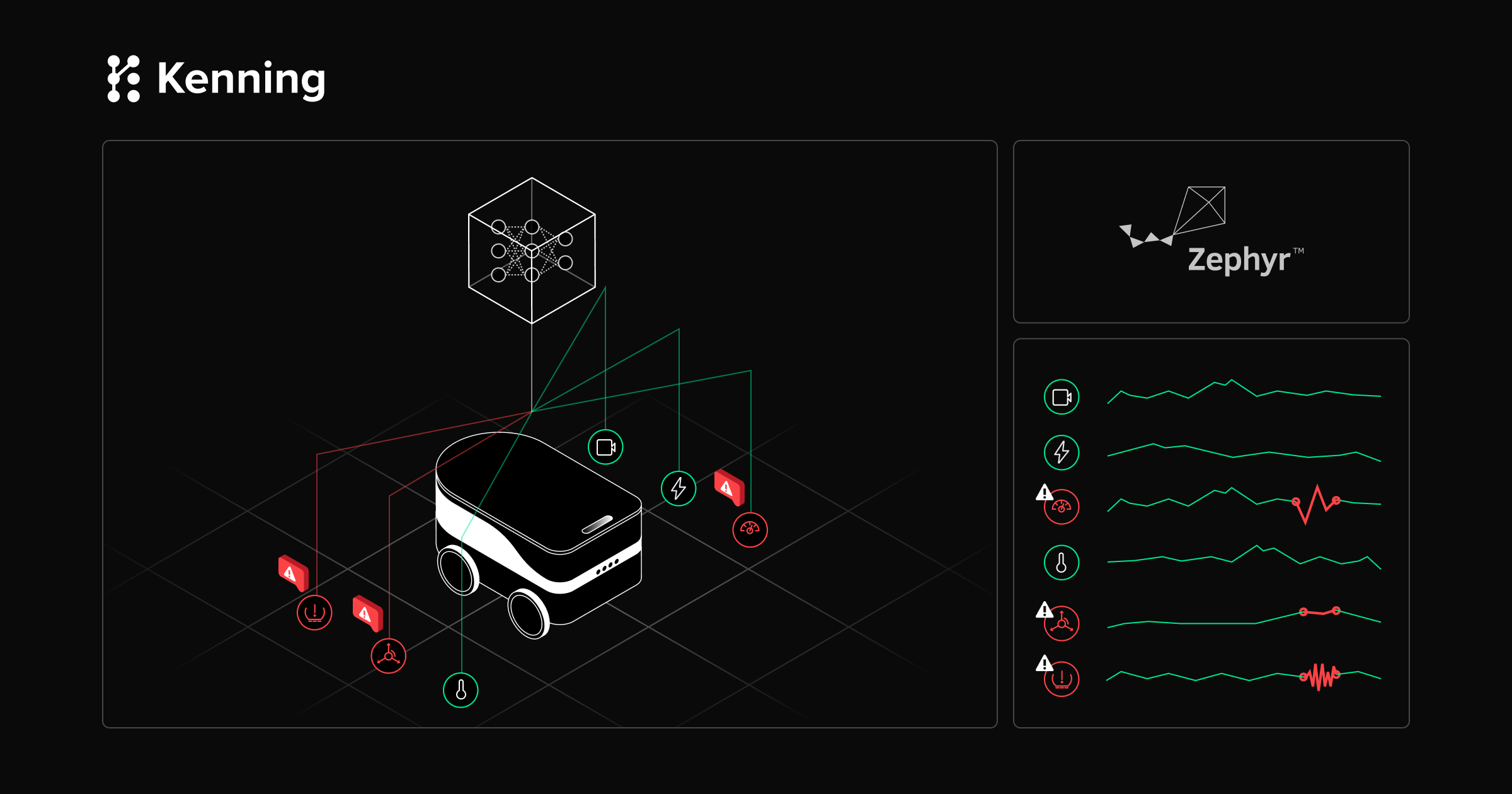
Antmicro, a member company of the Zephyr Project, introduces the Zephyr Sensor Anomalies library for embedded devices running Zephyr RTOS, explaining how it helps detect anomalies in sensor data and…