Written by Roy Jamil, Training Engineer at Ac6

Introduction
AC6 is a training provider for embedded systems. Our courses cover a wide range of topics, including programming languages, Linux, processor architecture, and real-time operating systems. One of our newest courses is our Zephyr training, which covers everything you need to know to develop efficient and reliable multithreaded applications using the Zephyr real-time operating system. If you’re interested in learning more about our Zephyr training course or any of our other courses, visit our website or contact us to find out more.
In this series of 4 blogs, we’ll discuss some of the most common problems that can arise when working with multithreaded systems, and we’ll provide practical solutions for solving these problems:
From the producer-consumer problem, where multiple threads share a common buffer for storing and retrieving data, to the readers-writer problem, where multiple reader threads need to access a shared resource concurrently.
Used kernel features
To ensure a solid foundation for understanding the Producer-Consumer solution, we will begin by presenting the semaphore mechanism.
Semaphores are synchronization primitives that can be used to coordinate and synchronize access to shared resources among multiple threads. They provide a mechanism for thread signalling and resource availability management thanks to an internal counter. Threads can acquire (Take) and release (Give) a semaphore, where acquiring a semaphore may block a thread if the resource is currently unavailable (when count is equal to 0), and releasing a semaphore signals that the resource is now available for other threads to acquire (increment the count).
A binary semaphore is a type of semaphore that can have two states: available or unavailable. It is often used where only one thread at a time is allowed to access a critical section of code or a shared resource. When a thread acquires a binary semaphore, it locks it, preventing other threads from acquiring it until it is released. It can be created in Zephyr by setting the count_limit to 1 in K_SEM_DEFINE.
If you’re interested in going deeper into mutual exclusion, synchronization, communication primitives, and other important concepts for developing robust multithreaded applications, check out our Zephyr training, or read this article.
Producer-Consumer problem
The producer-consumer problem is a classic example of a problem that can arise in real-time systems. It occurs when multiple threads (producers and consumers) share a common buffer for storing and retrieving data. The problem is to ensure that the producers do not overwrite data that the consumers have not yet processed, and vice versa.
One solution is to use a mutex to protect the shared buffer. The producer thread can acquire the mutex before adding data to the buffer, and the consumer thread can acquire the mutex before removing data from the buffer. This ensures that only one thread can access the buffer at a time, preventing the producer from overwriting data that the consumer has not yet processed and preventing the consumer from reading data that the producer has not yet written. But by doing it this way, we cannot control when to start producing or consuming, this why a semaphore should be used instead for synchronization.
We can synchronize both threads by using two semaphores: one to start the producer thread and one to start the consumer thread.
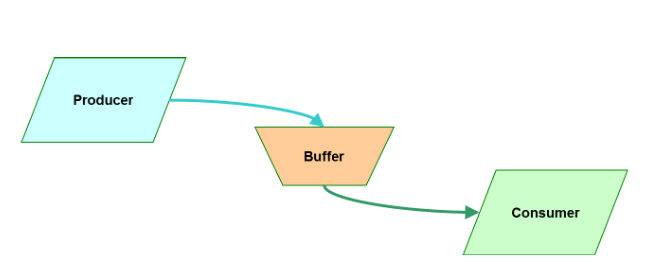
In this example, the producer thread and the consumer thread are both running concurrently and share a common buffer for storing and retrieving data.
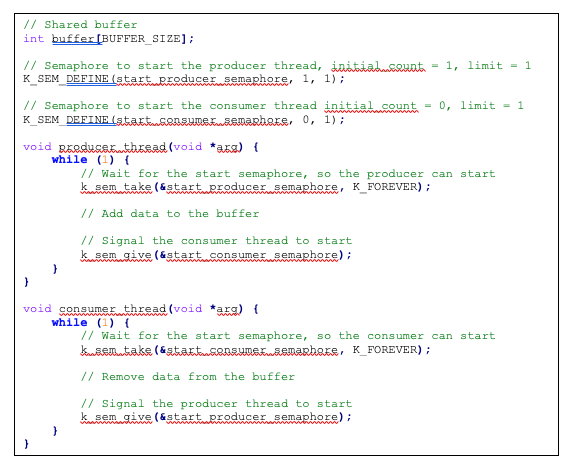
The producer thread waits for the “start_producer_semaphore” before beginning to produce data. When it is signaled, it can access the buffer and adds data to it, this semaphore is initialized with the value 1, which indicate that at the beginning the producer thread will access the shared buffer first. At the end, it signals the “start_consumer_semaphore” to start the consumer thread.
The consumer thread waits for the “start_consumer_semaphore” before beginning to consume data, it is initialized to 0, so it will wait for the producer. When it is signaled, it can now access the buffer and removes data from it. It then continues to wait for the “start_consumer_semaphore” to be signaled again before consuming.
By using this approach, the producer and consumer threads are synchronized and can access the shared buffer safely without overwriting each other’s data.
Another solution is to use a ring buffer or a queue; contents are stored in first-in-first-out order. In this approach, the producer and consumer tasks each have their own pointers to the buffer, and the producer writes data to the buffer starting at its pointer and wrapping around to the beginning of the buffer when it reaches the end. To learn more about this solution, check out the part 2 of this series.
Trace and debug:
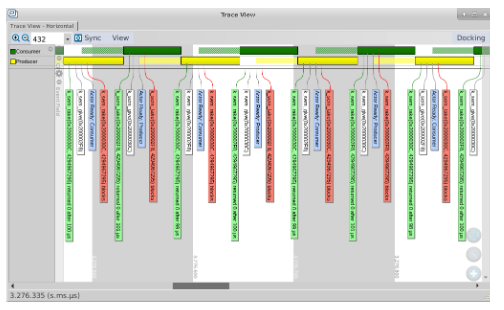
Tracealyzer can be used to help in understanding the behaviour of the system by providing a visual representation of how the different threads are interacting with each other over time. It can help to identify and diagnose problems such as deadlocks, priority inversions, and other synchronization issues by showing the order of execution and the flow of control between the different threads and tasks.
For example, when discussing the producer-consumer problem, Tracealyzer can be used to visualize the execution of the producer and consumer threads and how they interact with the shared buffer. As seen in the figure, the consumer (in green) executes after the semaphore was given by the producer (in yellow). This information can be useful in understanding the behavior of the system, identifying problems with synchronization, and finding solutions.
Conclusion
In conclusion, the producer-consumer problem is a common problem that occurs when a producer and a consumer share a common buffer for storing and retrieving data. One solution to this problem is to use two semaphores to synchronize the producer and consumer threads.
In the next blog article, we will implement the Producer(s)-Consumer(s) solution based on a message queue, which involves buffering multiple produced data within the queue. In this approach, we’ll explore how to efficiently coordinate and manage data exchange between producers and consumers using the message queue mechanism.
If you’re interested in learning more about the mechanisms available for synchronizing threads in the Zephyr real-time operating system, be sure to follow our full Zephyr training course. This course goes in-depth on all of the blocking and lock-free mechanisms available in Zephyr, and covers a wide range of other multithreading problems and solutions.
For more information, click here to see the course outline.
Zephyr Resources: