The Zephyr Project community is coming together for an in-person meetup in Brussels, just ahead of FOSDEM and during the broader EU Open Source Week. Whether you’re a long-time contributor…
https://www.youtube.com/watch?v=koXaW8YDTdk Saving flash with the SHELL_HELP macro Dual-band WiFi 6 ESP32-C5 announced - coming to Zephyr soon? AI-generated reports force curl to end their bug bounty program New automotive LIN subsystem (Local Interconnect Network) Compiler-based cleanup classes for…
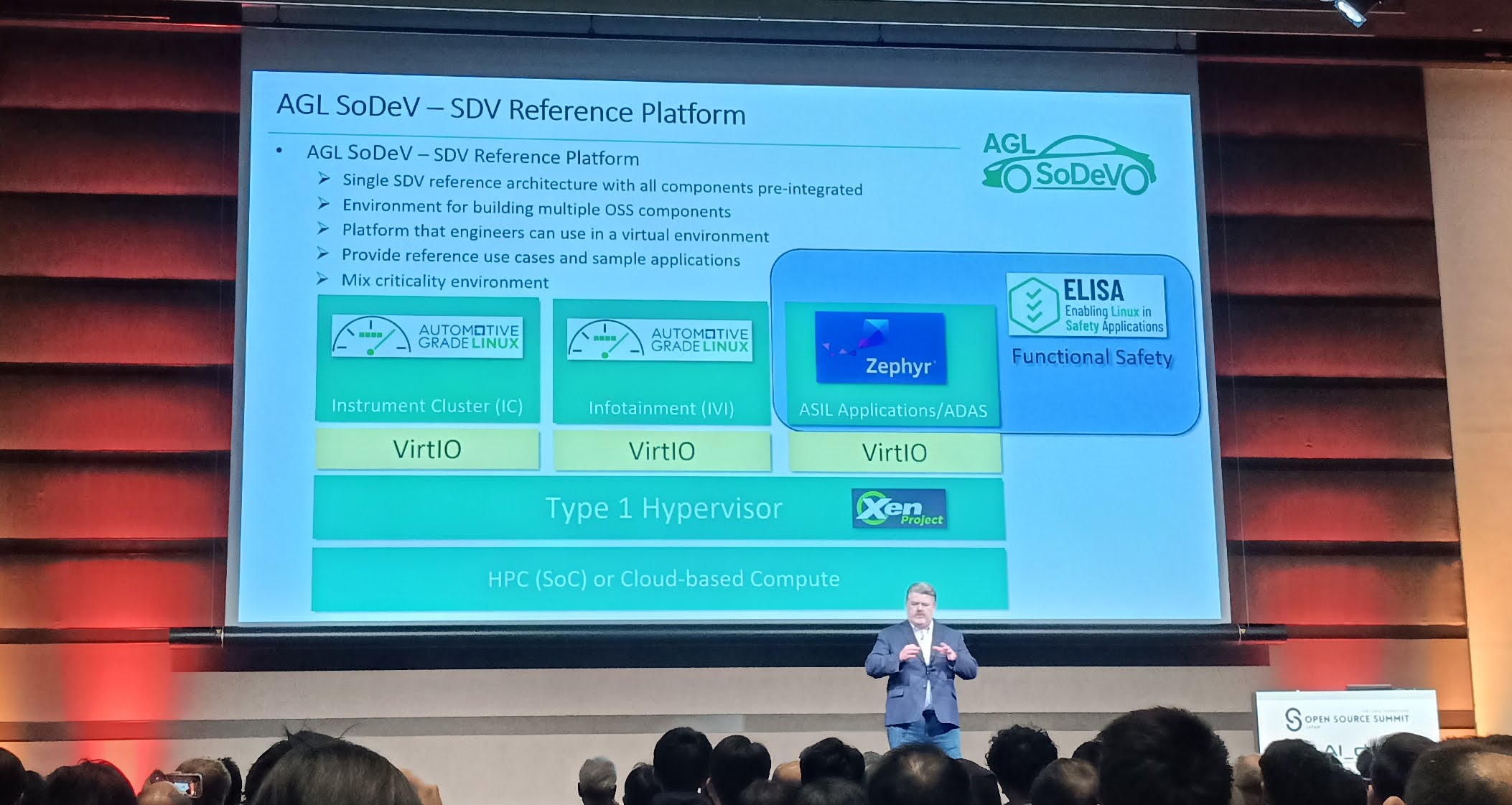
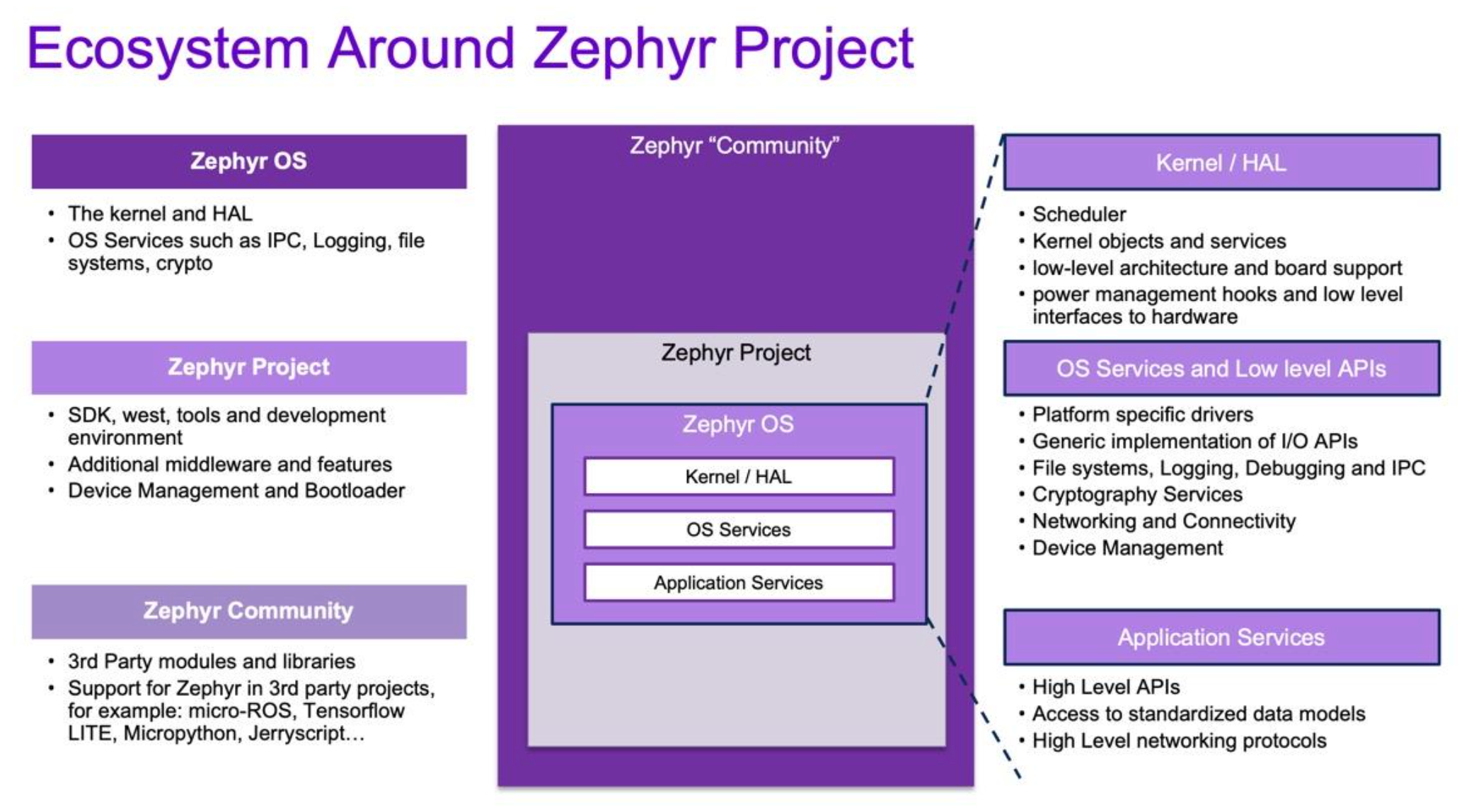
This blog is written by Tomohiro Kaneko(@misoji), a Hardware and Hobbyist engineer. (Discord usernames in brackets). Open Source Summit Japan 2025 brought the open source community together in Tokyo for…
https://www.youtube.com/watch?v=Vt-zrXwKbmo Basic button sample overhaul: now uses Input and LED subsystems for proper debouncing New Power On Self-Test (POST) RFC New Requests module for HTTP GET/POST/PUT/DELETE, including shell commands Standardized Doxygen guidelines now available (CI checks incoming)…
This blog is written by Tomohiro Kaneko(@misoji) a Hardware and Hobbyist engineer. (Discord usernames in brackets). The Zephyr Project Meetup in Toyosu, Tokyo was the third Zephyr Project Meetup in…
https://www.youtube.com/watch?v=xV27Qr657z4 Zephyr web display experiment MicroQuickJS 10Base-T1S multi drop (boards in Zephyr with support for it) RaspberryPi Pico binary info feature Keychron Q Ultra ZMK Motion 2350 Pro Adafruit Prop-Maker Feather Framework laptop keyboard…
Written by Abitzen Xavier - Silicon Labs, 2026 Chairman of the Governing Board Zephyr Project Happy New Year. As we approach the 10-year anniversary of the Zephyr Project, I…
https://www.youtube.com/watch?v=JSKL2QaNqa4 Rust no longer experimental in Linux Linux Rust CVE The return of the millennium bug The Y2K38 bug will likely impact Paris' metro lines... will it impact Zephyr? zscilib is looking for a maintainer Pullapprove being evaluated…
On December 4, 2025, the Zephyr Project community gathered in Karlsruhe, Germany, for an in-person meetup hosted by SMIGHT GmbH. The event brought together embedded developers, open source contributors, and…
This blog was originally published on the Golioth website on December 9, 2025, and was written by Mike Szczys, Senior Firmware Engineer at Golioth. Real-time operating systems (RTOS) are incredible…