This blog is written by Tomohiro Kaneko(@misoji), a Hardware and Hobbyist engineer. (Discord usernames in brackets).
Open Source Summit Japan 2025 brought the open source community together in Tokyo for three days of talks, booths, and hallway conversations. In this recap, we share highlights from the event with a special focus on Zephyr-related sessions, including talks that drew packed rooms and even overflowed into the hallways.
Venue
Open Source Summit Japan 2025 was held in Tokyo, Japan from Monday, December 8 to Wednesday, December 10, 2025, at the Toranomon Hills Forum. It was a massive conference with over 1,000 registrants, co-located with “AI_dev: Open Source GenAI & ML Summit Japan” and the “Automotive Linux Summit.”
The organizers provided excellent coffee, snacks, and bento boxes, fostering a welcoming atmosphere where attendees and speakers engaged in lively and enthusiastic discussions.
Photo highlights from the venue includes:
- The venue was the prestigious Toranomon Hills in Tokyo
- Excellent coffee, snacks, and bento boxes





")


Open Source Summit Japan 2025 Highlights
The exhibition floor was bustling with activity, featuring numerous booths, including several showcasing Zephyr technologies.


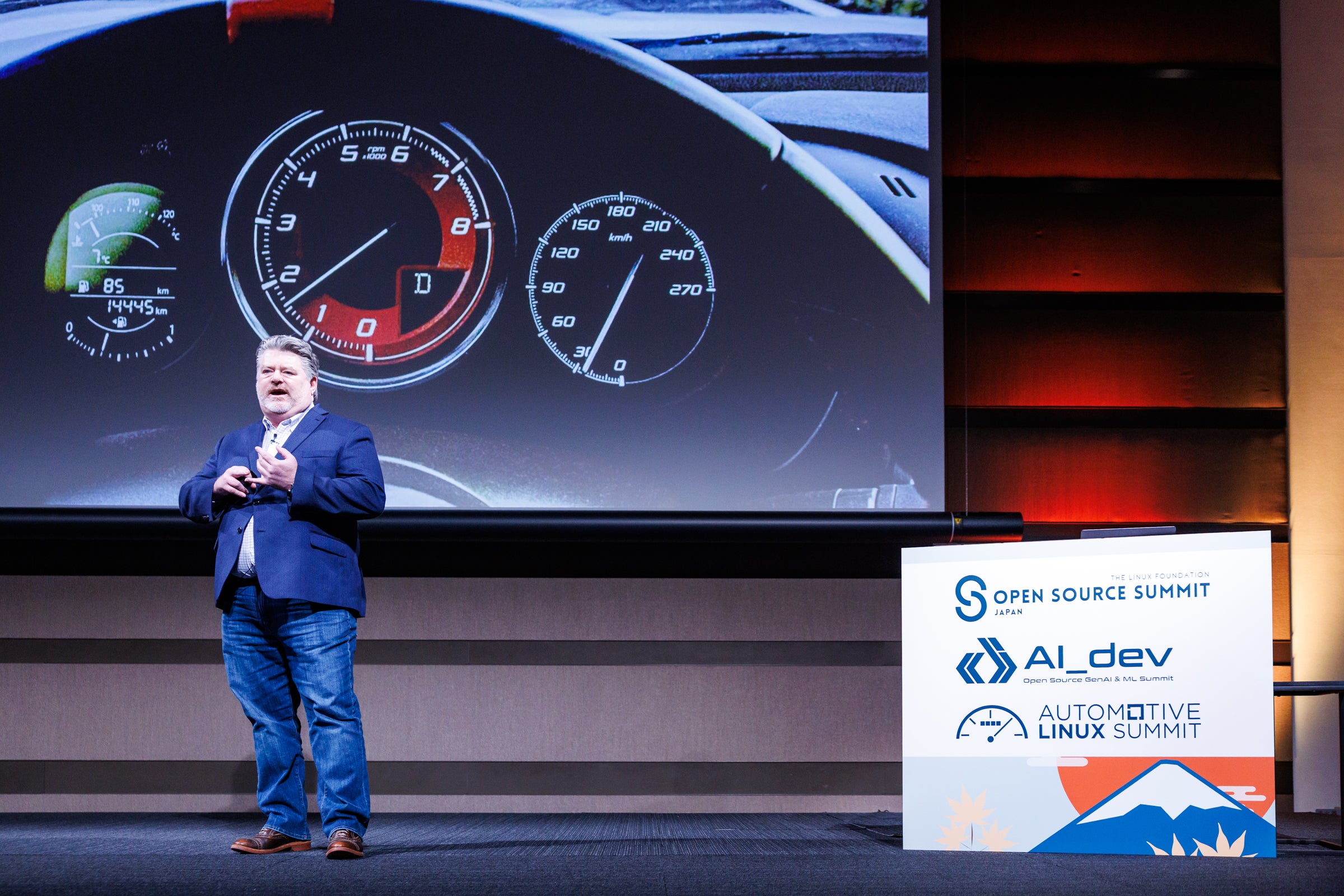
Zephyr’s growing importance was evident throughout the event. It was frequently mentioned as a key topic during keynote speeches, particularly those related to the automotive industry, indicating a significant surge in interest and attention toward the project.


On the evening of the second day, a reception was held within the exhibition area. It was a highly energetic social event that provided a great opportunity for networking.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Zephyr Session Highlights
As for the sessions, many Zephyr community members took the stage to share their reports and insights. Below, we introduce some of the key talks.
The Zephyr sessions were incredibly popular. Many of the rooms were packed to capacity, with attendees often overflowing into the hallways due to the high interest.
Running CFS on Zephyr: A Modern RTOS for Space Missions – Yasushi Shoji & Takuya Sasaki, Space Cubics Inc
Yasushi Shoji and Takuya Sasaki from Space Cubics introduce the integration of NASA’s core Flight System (cFS) with the Zephyr RTOS. This porting project leverages Zephyr’s modern hardware abstraction and modular build system to streamline the development of mission-critical spacecraft software. The resulting platform provides a scalable, open-source framework for diverse satellite architectures, ranging from small CubeSats to complex lunar landers.
Applying Zephyr RTOS in Spacecraft Development – Takayuki Goto, Space Entry Co., Ltd.
Takayuki Goto from Space Entry Co., Ltd. presents the application of Zephyr RTOS in an autonomous, fan-propelled robot designed for the International Space Station. The control system utilizes Zephyr to manage propulsion, attitude control, and sensor fusion on an STM32 platform, benefiting from the OS’s broad hardware support. This project aims to demonstrate efficient spacecraft development and establish Zephyr as a standard for the future era of commercial space stations.
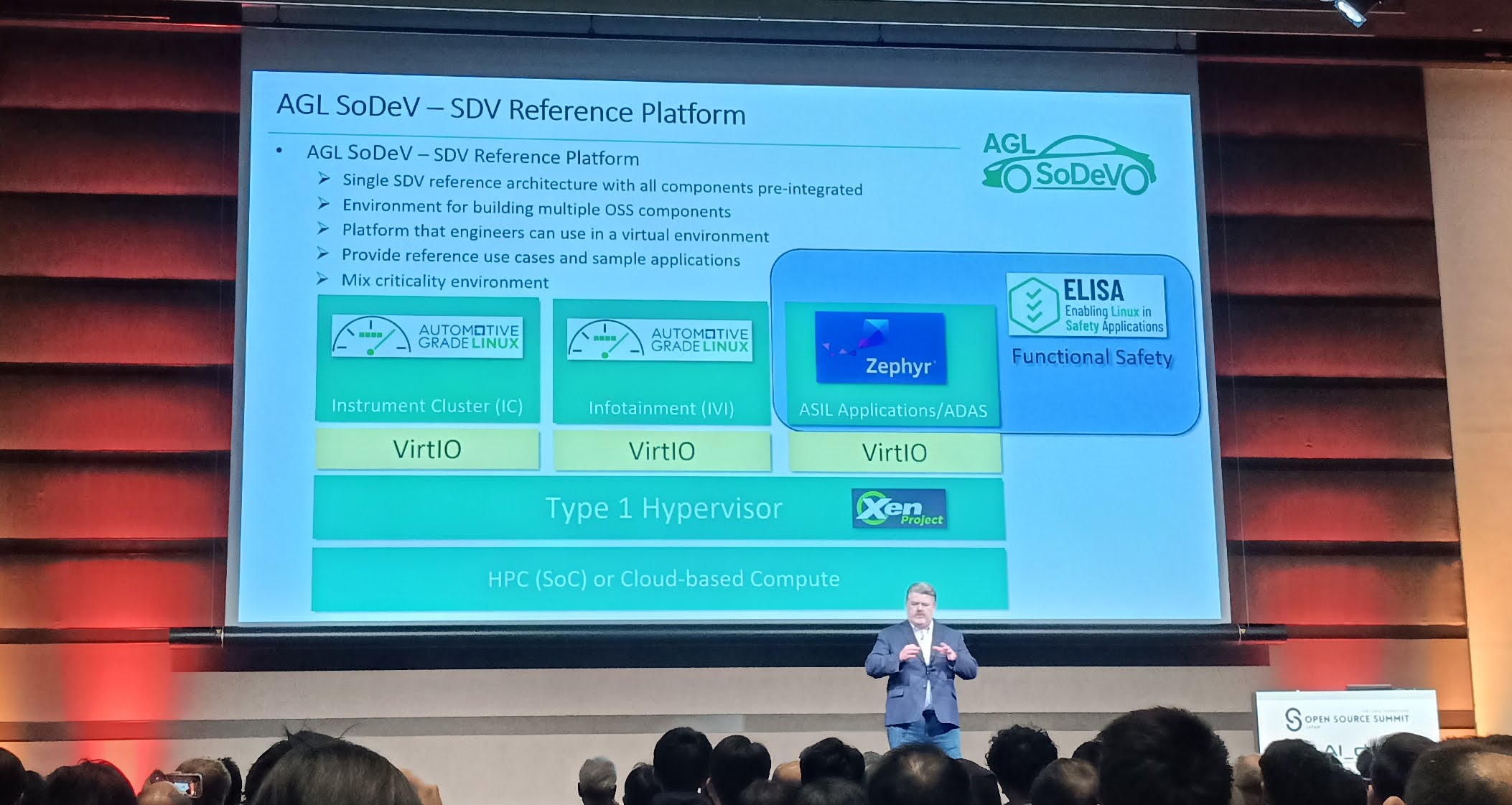
Zephyr: A Game Changer for the Automotive Industry – Yuichi Kusakabe, Honda Motor Co., Ltd.
Yuichi Kusakabe from Honda Motor Co., Ltd. introduces Zephyr RTOS as a lightweight, open-source platform that serves as a game-changer for the automotive industry. The framework supports critical interfaces like CAN and Ethernet and is progressing toward ISO 26262 functional safety certification for mission-critical use. Honda is leveraging Zephyr within Software-Defined Vehicle (SDV) architectures to efficiently manage real-time tasks across both microcontrollers and complex system-on-chips.
Challenging Hardware Contests With Zephyr and Lessons Learned – Tomohiro Kaneko, Brother Industries, Ltd.
Tomohiro Kaneko, a hardware engineer and hobbyist, shares his experience using Zephyr RTOS to compete in several hardware development contests. He successfully implemented Zephyr in diverse projects, including a first-prize-winning BLE audio speaker and an AI-powered wildlife monitoring system. His work highlights Zephyr’s strengths in low power consumption, small memory footprint, and broad hardware support, making it an ideal framework for rapid prototyping and innovative embedded design.
TinyML at the Edge: Deploying and Optimizing AI Workloads on Zephyr RTOS – Amandeep Singh, Welzin
Amandeep Singh from win.ai explains how to deploy and optimize TinyML workloads on Zephyr RTOS to enable efficient AI inference directly on edge devices. He highlights the use of various inference engines like TensorFlow Lite Micro and tools like AutoML to simplify model development for resource-constrained hardware. Additionally, he introduces linkable loadable extensions for “hot swapping” models at runtime, which allows for seamless updates without the need to reflash the microcontroller.
Bof: Zephyr Community in Japan: From Hobbyist To Automotive, Robotics, and Space Development – Hideki Takase, The University of Tokyo & Yasushi Shoji, Space Cubics
Hideki Takase and Yasushi Shoji highlight the growing Zephyr RTOS community in Japan, discussing its expanding role in sectors like automotive, space, and robotics. A key application features a robot for decommissioning the Fukushima nuclear plant, which utilizes 14 Zephyr nodes running the micro-ROS stack for specialized control. The session also explores Zephyr 4.3’s new features and the potential of communication protocols like DDS and Zenoh for high-performance embedded systems.
Lightning Talk: Debugging Edge AI on Zephyr and Lessons Learned – Tomohiro Kaneko, Brother Industries, Ltd.
Tomohiro Kaneko, a hardware engineer and hobbyist, demonstrates how to implement and debug Edge AI on Zephyr RTOS using affordable hardware like the Seeed Xiao and Raspberry Pi Pico. He showcases practical examples of motion and audio recognition created with Edge Impulse and TensorFlow Lite Micro frameworks. His presentation proves that these AI models are exceptionally lightweight, fitting into a minimal memory footprint of just kilobytes.
Zephyr: Learnings From Working on Safety Certification in the Open – Kate Stewart, The Linux Foundation
Kate Stewart, Director of the Zephyr Project, describes the effort to achieve functional safety certifications (IEC 61508 and ISO 26262) for the Zephyr kernel. The project integrates requirements traceability and documentation tools like StrictDoc into its CI workflow to generate the necessary evidence for safety assessments. This strategy aims to harmonize safety and security, providing a scalable, open-source framework that lowers the barrier for developing mission-critical systems.
Zephyr‑Based VIRTIO Backend on Xen: Toward Open Source Functional Safety – Hiroshi Tokita
Hiroshi Tokita explores the integration of Zephyr RTOS with the Xen hypervisor through a VIRTIO backend to improve functional safety in Software-Defined Vehicles (SDVs). By replacing heavy Linux service domains with lightweight Zephyr instances, this approach drastically reduces code volume, making functional safety certification more achievable. The resulting framework provides a scalable and secure platform for consolidating complex automotive functions into a single high-performance system.
Introducing a Heterogeneous Core Platform With AI Accelerator for Zephyr Development – Yuya Hamamachi, Renesas Electronics Corporation
Yuya Hamamachi from Renesas introduces “Sparrowhawk,” a hackable heterogeneous platform featuring Cortex-A76/R52 cores and an AI accelerator to drive Zephyr adoption in the automotive sector. The board supports Zephyr across multiple processing domains and the Xen hypervisor, aiming to provide a powerful, open-source reference for next-generation Software-Defined Vehicles. This initiative seeks to build a positive development cycle by offering a low-cost, high-performance path from prototyping to mass production.
Zephyr Porting Efforts in High Performance SoCs – Kunihiko Hayashi, Socionext Inc.
Kunihiko Hayashi from Socionext explores porting Zephyr RTOS to high-performance ARM64 SoCs to support future mixed-OS environments in sectors like automotive and data centers. He demonstrates a practical approach using existing Linux bootloaders like U-Boot to simplify hardware initialization and driver development. By addressing challenges such as MMIO mapping and device tree standardization, his work aims to create a scalable framework for isolating critical real-time tasks in complex systems.
Thanks to:
We recently had the opportunity to participate in Open Source Summit Japan (OSSJ). It was a valuable and massive event, and we are thrilled that so many Zephyr members were able to present on this prestigious stage.
We want to extend a special thank you to all the speakers who shared their expertise and insights. Your contributions were outstanding.
Additionally, this event would not have been possible without the support of many dedicated individuals. Our deepest gratitude goes out to:
-The Zephyr RTOS User Group – Japan
(especially Hiroshi Tokita (@soburi), Yasushi Shoji (@yashi)) *Discord usernames in brackets
-The OSSJ Volunteers
-The OSSJ Program Committee
Thank you all for making this a memorable experience!