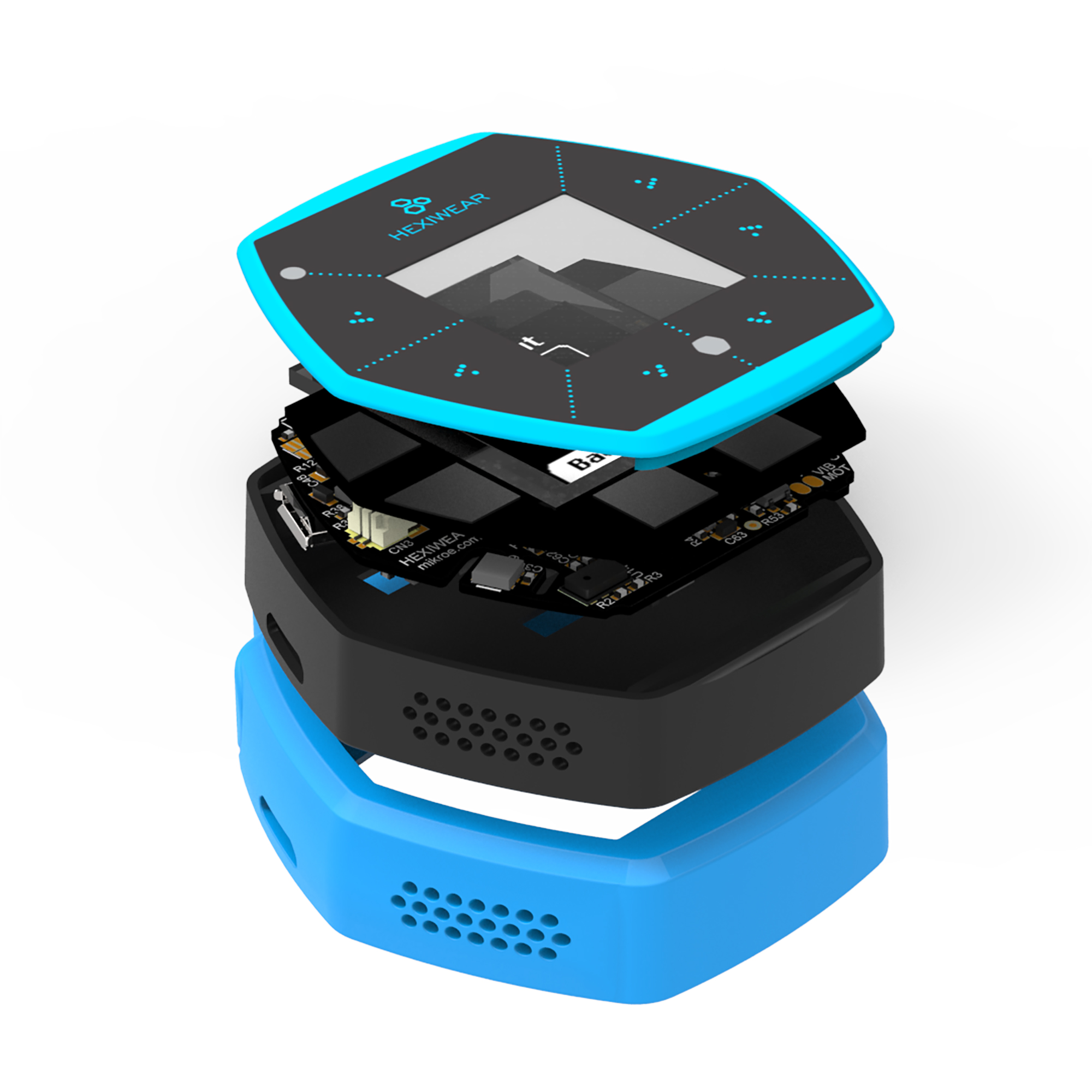
Hexiwear¶
Overview¶
Hexiwear is powered by a Kinetis K64 microcontroller based on the ARM Cortex-M4 core. Another Kinetis wireless MCU, the KW40Z, provides Bluetooth Low Energy connectivity. Hexiwear also integrates a wide variety of sensors, as well as a user interface consisting of a 1.1” 96px x 96px full color OLED display and six capacitive buttons with haptic feedback.
- Eye-catching Smart Watch form factor with powerful, low power Kinetis K6x MCU and 6 on-board sensors.
- Designed for wearable applications with the onboard rechargeable battery, OLED screen and onboard sensors such as optical heart rate, accelerometer, magnetometer and gyroscope.
- Designed for IoT end node applications with the onboard sensor’s such as temperature, pressure, humidity and ambient light.
- Flexibility to let you add the sensors of your choice nearly 200 additional sensors through click boards.
Hardware¶
- Main MCU: NXP Kinetis K64x (ARM Cortex-M4, 120 MHz, 1M Flash, 256K SRAM)
- Wireless MCU: NXP Kinetis KW4x (ARM Cortex-M0+, Bluetooth Low Energy & 802.15.4 radio)
- 6-axis combo Accelerometer and Magnetometer NXP FXOS8700
- 3-Axis Gyroscope: NXP FXAS21002
- Absolute Pressure sensor NXP MPL3115
- Li-Ion/Li-Po Battery Charger NXP MC34671
- Optical heart rate sensor Maxim MAX30101
- Ambient Light sensor, Humidity and Temperature sensor
- 1.1” full color OLED display
- Haptic feedback engine
- 190 mAh 2C Li-Po battery
- Capacitive touch interface
- RGB LED
For more information about the K64F SoC and Hexiwear board:
- K64F Website
- K64F Datasheet
- K64F Reference Manual
- Hexiwear Website
- Hexiwear Fact Sheet
- Hexiwear Schematics
Supported Features¶
The hexiwear_k64 board configuration supports the following hardware features:
| Interface | Controller | Driver/Component |
|---|---|---|
| NVIC | on-chip | nested vector interrupt controller |
| SYSTICK | on-chip | systick |
| PINMUX | on-chip | pinmux |
| GPIO | on-chip | gpio |
| I2C | on-chip | i2c |
| UART | on-chip | serial port-polling; serial port-interrupt |
| FLASH | on-chip | soc flash |
| SENSOR | off-chip | fxos8700 polling; fxos8700 trigger; fxas21002 polling; fxas21002 trigger; max30101 polling |
The default configuration can be found in the defconfig file:
boards/arm/hexiwear_k64/hexiwear_k64_defconfig
Other hardware features are not currently supported by the port.
Connections and IOs¶
The K64F SoC has five pairs of pinmux/gpio controllers.
| Name | Function | Usage |
|---|---|---|
| PTA29 | GPIO | LDO_EN |
| PTB0 | I2C0_SCL | I2C / MAX30101 |
| PTB1 | I2C0_SDA | I2C / MAX30101 |
| PTB12 | GPIO | 3V3B EN |
| PTB16 | UART0_RX | UART Console |
| PTB17 | UART0_TX | UART Console |
| PTC8 | GPIO | Red LED |
| PTC9 | GPIO | Green LED |
| PTC10 | I2C1_SCL | I2C / FXOS8700 / FXAS21002 |
| PTC11 | I2C1_SDA | I2C / FXOS8700 / FXAS21002 |
| PTC18 | GPIO | FXAS21002 INT2 |
| PTD0 | GPIO | Blue LED |
| PTD13 | GPIO | FXOS8700 INT2 |
| PTE24 | UART4_RX | UART BT HCI |
| PTE25 | UART4_TX | UART BT HCI |
System Clock¶
The K64F SoC is configured to use the 12 MHz external oscillator on the board with the on-chip PLL to generate a 120 MHz system clock.
Serial Port¶
The K64F SoC has six UARTs. One is configured for the console, another for BT HCI, and the remaining are not used.
Programming and Debugging¶
The Hexiwear docking station includes the NXP OpenSDA serial and debug adapter built into the board to provide debugging, flash programming, and serial communication over USB.
To use the pyOCD tools with OpenSDA, follow the instructions in the pyOCD page using the DAPLink Hexiwear Firmware.
To use the Segger J-Link tools with OpenSDA, follow the instructions in the Segger J-Link page using the Segger J-Link OpenSDA V2.1 Firmware.
Note
The OpenSDA adapter is shared between the K64 and the KW40Z via switches, therefore only one SoC can be flashed, debugged, or have an open console at a time.
Configure the docking station switches to route the desired SoC signals to the OpenSDA adapter:
| Switch | Signal | KW40Z | K64 |
|---|---|---|---|
| 1 | MK64 SWDIO | OFF | ON |
| 2 | MK64 RST | OFF | ON |
| 3 | MKW40 RST | ON | OFF |
| 4 | MKW40 SWDIO | ON | OFF |
| 5 | OSDA | ON | ON |
| 6 | LED1 | OFF | OFF |
| 7 | LED2 | OFF | OFF |
| 8 | LED3 | OFF | OFF |
Flashing¶
This example uses the Hello World sample with the
pyOCD tools. Use the make flash build target to build
your Zephyr application, invoke the pyOCD flash tool and program your Zephyr
application to flash.
$ cd <zephyr_root_path>
$ . zephyr-env.sh
$ cd samples/hello_world/
$ make BOARD=hexiwear_k64 FLASH_SCRIPT=pyocd.sh flash
Open a serial terminal (minicom, putty, etc.) with the following settings:
- Speed: 115200
- Data: 8 bits
- Parity: None
- Stop bits: 1
Reset the board and you should be able to see on the corresponding Serial Port the following message:
Hello World! arm
Debugging¶
This example uses the Hello World sample with the
pyOCD tools. Use the make debug build target to build
your Zephyr application, invoke the pyOCD GDB server, attach a GDB client, and
program your Zephyr application to flash. It will leave you at a gdb prompt.
$ cd <zephyr_root_path>
$ . zephyr-env.sh
$ cd samples/hello_world/
$ make BOARD=hexiwear_k64 DEBUG_SCRIPT=pyocd.sh debug
Using Bluetooth¶
Configure the KW40Z as a Bluetooth controller¶
The K64 can support Zephyr Bluetooth host applications when you configure the KW40Z as a Bluetooth controller.
- Download and install the KW40Z Connectivity Software. This package contains Bluetooth controller application for the KW40Z.
- Flash the file
tools/binaries/BLE_HCI_Modem.binto the KW40Z.
Now you can build and run the sample Zephyr Bluetooth host applications on the K64. You do not need to repeat this step each time you flash a new Bluetooth host application to the K64.
Peripheral Heart Rate Sensor¶
Navigate to the Zephyr sample application and build it for the Hexiwear K64.
$ cd samples/bluetooth/peripheral_hr
$ make BOARD=hexiwear_k64
Flash the application to the Hexiwear K64. Make sure the OpenSDA switches on the docking station are configured for the K64.
Reset the KW40Z and the K64 using the push buttons on the docking station.
Install the Kinetis BLE Toolbox on your smartphone:
Open the app, tap the Heart Rate feature, and you should see a Zephyr Heartrate Sensor device. Tap the Zephyr Heartrate Sensor device and you will then see a plot of the heart rate data that updates once per second.